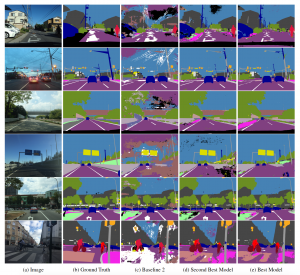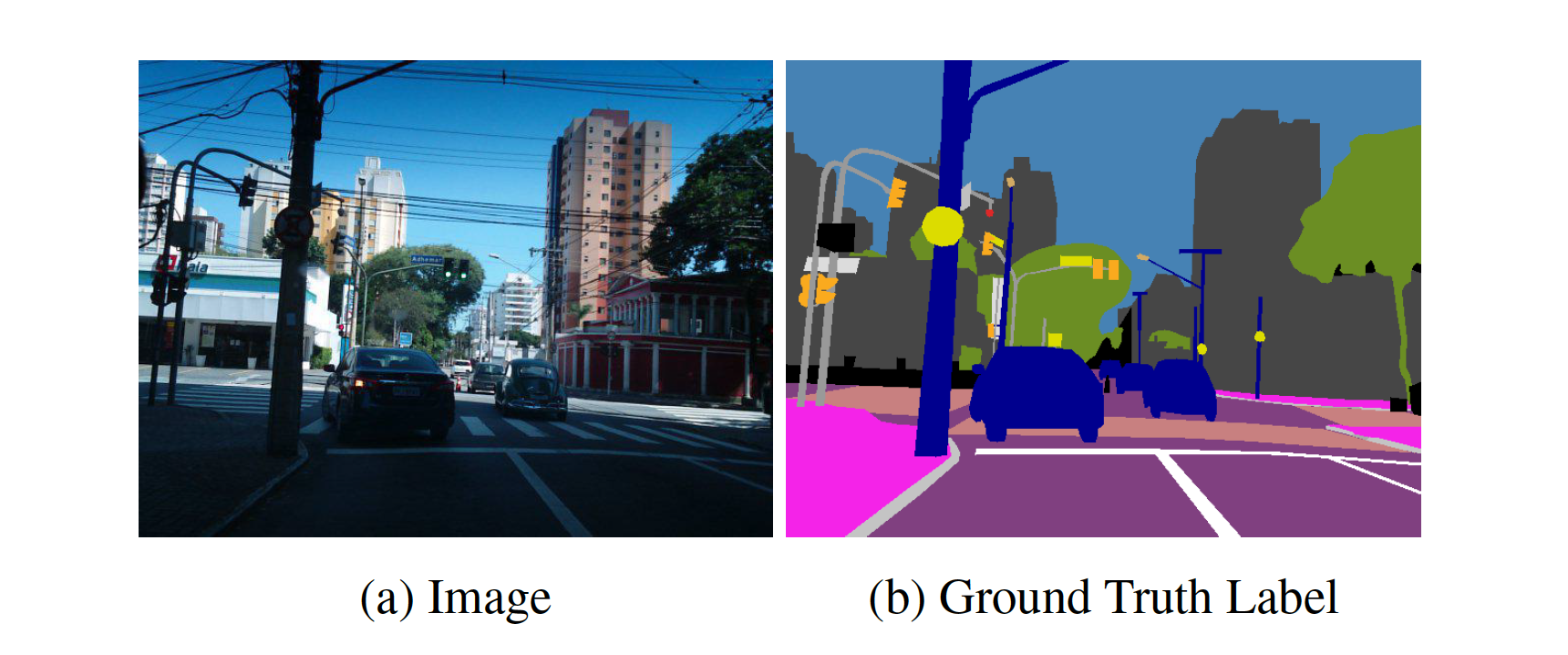
Semantic segmentation in the traffic environment is an important perception task for autonomous driving. This project performed semantic segmentation on the Mapillary Vistas Dataset, a novel street scene dataset containing 66 object categories. We conducted transfer learning based on the DeepLabv3+ developed by Google TensorFlow. The DeepLabv3+ model employs the spatial pyramid pooling module and the encode-decoder structure. Our fine-tuned model is able to score 23.6% mIoU on the test set of the Mapillary Vistas Dataset (being able to rank No.6 on the MVD Challenge Leaderboard as of Jun. 7, 2018).