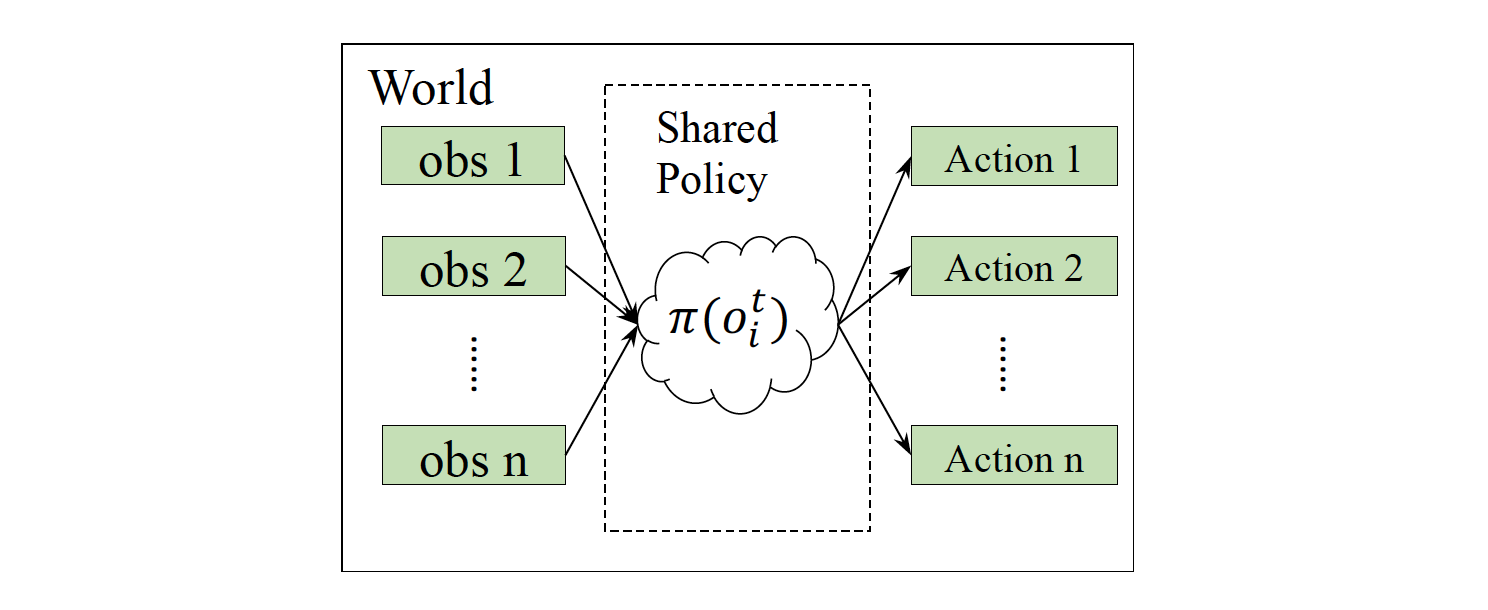
A multi-agent collision avoidance problem is challenging to solve directly because of the large observation space and action space. We decompose the full problem into local collision avoidance sub-problems by using decentralized control, i.e., we map the local observations of each agent to its actions using a policy. We use homogeneous agents for the problem formulation. Therefore, we are able to use a shared policy for all the agents. The policy is trained using deep Q-network and trust region policy optimization with multi-agent adaptations. The learned policy is able to guide the agents efficiently and safely towards their destinations.